Groups and Geometry
Preamble
Introduction
Fundamental knowledge from linear algebra and group theory is assumed. You may want to check the appendix and my other notes.
Resources Used
- Groups and Symmetry by M. A. Armstrong
- Symmetries by D.L. Johnson
- Cut The Knot website
- From Groups to Geometry and Back by Vaughn Climenhaga and Anatole Katok
- Lecture notes by Şükran Gül Erdem
- Transformation Geometry: An Introduction to Symmetry by George E. Martin
- Reflection Groups and Coxeter Groups by James E. Humphreys
- Finite Reflection Groups by C. T. Benson
Notation
- 0 \in \N and \N^+ :=\ \N \setminus \{0\}.
- \varnothing denotes the empty set.
Status
These notes are still under work therefore not complete, also
- there are not many exercises,
- proofs might be absent,
- typos are quite possible,
- ordering is generally good but should be improved, and
- more visuals and intuition should be provided.
Todo's
- Delve into the complex plane?
- Define conformality and show every isometry is conformal.
- Explain (formally prove) group-theoric concepts with geometry
- Especially better explain homomorphism, isomorphism and their groups and finally semidirect products
- Add figures drawn on excalidraw.
- Beckman–Quarles theorem
- Affine transformation
- Homotethy
- Shear Transform
- Spiral Similarity
- Inversion
- Stereographic Projection and Inversion
- Möbius Transformations
Nielsen–Schreier theorem via trees
Isometries
Def. Isometry
Let (X, d_X) and (Y, d_Y) be metric spaces. A map f: X \to Y is called an isometry or distance-preserving map if for all a, b \in X,
d_X(a, b) = d_Y(f(a), f(b))Two metric spaces (X, d_X) and (Y, d_Y) are called isometric if there is a bijective isometry between them.
Thm. Basic Properties of Isometries
Let f: X \to Y be an isometry on the metric spaces (X, d_X) and (Y, d_Y), then
- f is always injective.
- f is not necessarily surjective. For example x \mapsto (x,0) is an isometry but not surjective on \R \to \R^2.
- Composition of isometries are an isometry.
Exercise
Thm. Inverse of an Isometry
Let f: X \to Y be an isometry. If f is bijective then f^{-1} is also an isometry. Consider the case f is not bijective, then we can construct an bijective isometry
\def\arraystretch{1.25} \begin{array}{cccc} f':& X &\to& \text{Im}(f) \\ & x &\mapsto& f(x) \end{array}so that since f is injective (and thus f') and f' is surjective we have, by construction, f' bijective.
Thm. Isometries are Continuous
An isometry f: X \to Y is always continuous.
Proof
For any x,y \in X we have
d_X(a, b) = d_Y(f(a), f(b))so that if x_n \to x, then d_X(x_n, x) \to 0, therefore f(x_n) \to f(x) due to distance-preservation.
Def. \text{Isom}(X)
Let (X, d) be a metric space, then set of all bijective isometries on X denoted \text{Isom}(X) forms a group under composition called the (full) isometry group of X.
Exercise.
Thm. \text{Isom}(\Z)
We have
\text{Isom}(\Z) \cong \bold{D}_{\infty} \cong \Z \rtimes \Z_2where \bold{D}_\infty is the infinite dihedral group.
Exercises
#1
Let f: X \to Y be an isometry on the metric spaces (X, d_X) and (Y, d_Y). Show that f preserves diameters so that for A \subseteq X we have
\text{diam}(A) = \text{diam}(f(A))where \text{diam}(X) := \sup\Set{d(x,y) \mid x,y \in X}.
Symmetries
Def. Symmetry
Let (X,d) be a metric space and S \subseteq X. A symmetry of S is an isometry f: X \to X such that
f(S)=SDef. \text{Sym}(S)
Let (X,d) be a metric space and S \subseteq X, then the set of all symmetries of S forms a group, and thus is a subgroup of \text{Isom}(X).
Exercise
Example. \text{Sym}(\Z)
The group of symmetries of \Z is generated by two elements, particularly by a translation and a reflection so that
\text{Sym}(\Z) = \Braket{t,r}where t(n) = n+1 and r(n) = -n.
Sketch of Proof
TODO
Euclidian Isometries
From now on we will mostly work on the Euclidian n-space \R^n.
Recall that any inner product on a vector space induces a norm such that
\Vert x \Vert = \sqrt{\Braket{x,x}}so reversing this, we get the following polarization identity for \R^n:
\Braket{x,y} = \dfrac{\Vert x\Vert^2 + \Vert y \Vert^2 - \Vert x-y\Vert^2}{2}Def. Euclidian Isometry
From now on we will call an isometry f: \R^n \to \R^n under the Euclidian distance an Euclidian isometry.
Notice that \tilde{f}(x) := f(x) - f(0), which we will call reduced Euclidian isometry of f, is an origin-fixing Euclidian isometry so that \tilde{f}(0) = 0.
Thm. Euclidian Isometries are Bijective
Let f: \R^n \to \R^n be any Euclidian isometry, then f is bijective.
Sketch of Proof
We already know f is injective. Prove that \tilde{f} is surjective.
Thm. \text{Sym}(\R^n) = \text{Isom}(\R^n)
Obvious as each Euclidian isometry is bijective.
Thm. Norm Preservation
Let \tilde{f} be an origin-fixing Euclidian isometry, then \tilde{f} preserves the norm so that, for all x \in \R^n
\Vert \tilde{f}(x) \Vert = \Vert x \VertExercise
Thm. Inner Product Preservation
Let \tilde{f} be an origin-fixing Euclidian isometry, then \tilde{f} preserves the inner product so that, for all x,y \in \R^n
\Braket{x, y} = \Braket{\tilde{f}(x), \tilde{f}(y)}Sketch of Proof
Use the polarization identity
Thm. Additivity
Let \tilde{f} be an origin-fixing Euclidian isometry, then \tilde{f} is additive so that, for all x,y \in \R^n
\tilde{f}(x + y) = \tilde{f}(x) + \tilde{f}(y)TODO: Add not so simple proof which make use of norm expension and preservation
Thm. Euclidian Isometry Linearity
An Euclidian isometry f: \R^n \to \R^n is linear if and only if it fixes the origin.
Sketch of Proof
Linear \implies origin-fixing is obvious so assume f fixes the origin. We have already proved inner product preservation and additivity. We just need to prove homogenity.
We should prove this here in detail and homogenity proof might be hard
Platonic Solids
Def. Polygon, n-gon
There is no established definition for a polygon. Currently think of it as an geometric object with a closed surface connected by closed polygonal chain.
An n-gon is a polygon with n edges.
Def. Regular n-gon
For n \geq 3, a regular n-gon denoted by \bold{P}_n is a (closed) polygon with n sides of equal length joined together at equal angles.
Thm. Regular n-gon Symmetries
A regular n-gon has 2n different symmetries which are n rotational symmetries and n reflection symmetries.
Thm. Dihedral Group
The symmetries of the regular n-gon \bold{P}_n forms a group under composition called the dihedral group denoted by \bold{D}_{2n}.
\text{Sym}(\bold{P}_n) \cong \bold{D}_{2n}Some authors prefer the notation \bold{D}_n or \bold{Dih}_n, however notice that in our case 2n denotes the number of symmetries and its order.
\bold{D}_{2n} is the semidirect product of C_2 acting on C_n via the automorphism \varphi_s(r) = r^{-1}, therefore:
The group representation of \bold{D}_{2n} is as follows:
\bold{D}_{2n} = \Braket{r,s \mid r^n = s^2 = 1, srs = r^{-1}}where r denotes a rotation and s denotes a reflection.
Notice that, by srs=r^{-1} condition, we have by induction: sr^k = r^{-k}s.
Def. Convex
A set is said to be convex if any two points A and B are contained in the set, the entire line segment [AB] also lies within the set.
Def. Polyhedron
A polyhedron is an union of finitely many convex polygons (called faces), arranged in space so that the intersection of any two polygons is a shared vertex or edge or the empty set.
This is the definition by O'Rourke (1993). Definitions of polyhedron (although differs) are equivalent and agreed upon.
Def. Platonic Solid
A platonic solid is a convex regular polyhedron in three-dimensional space. Therefore, its faces are congruent regular n-gons and at each vertex the same number of polygons (called faces) meet.
Thm. Euler's Polyhedron Formula
Any three-dimensional convex polyhedrons surface has an Euler characteristic of \chi = 2 so that
2 = \chi = V - E + FFor the proof, please check out various online resources that are both geometric and algebraic.
Thm. Platonic Solids
There are only 5 platonic solids called (regular) tetrahedron, cube, (regular) octahedron, (regular) dodacahedron and (regular) icosahedron.
| Polyhedron | Vertices | Edges | Faces |
|---|---|---|---|
| Tetrahedron | 4 | 6 | 4 |
| Cube | 8 | 12 | 6 |
| Octahedron | 6 | 12 | 8 |
| Dodecahedron | 20 | 30 | 12 |
| Icosahedron | 12 | 30 | 20 |
Sketch of Proof
Use the Euler's Polyhedron Formula and the definition of platonic solids to deduce all the integer solutions.
Cube
Thm. Cube Symmetries
Let G be the symmetry group of the cube including the rotations and the reflections, then
- A cube has 24 rotations in total that consists of
- 9 rotations through 3 face axes
- 90\degree
- 180\degree
- 270\degree
- 8 rotations through 4 vertex axes
- 120\degree
- 240\degree
- 6 rotations through 6 edges
- the identity
- 9 rotations through 3 face axes
- G \cong \bold{S}_4 \times \Z_2 where \bold{S}_4 consists of rotations and \Z_2 consists of \Set{1,d} where d is the central inversion.
- Every rotation of the cube maps vertices to vertices, so each diagonal is mapped to another diagonal.
Thm. Rotations on Cube
- A non-trivial rotation fixes exactly one axis.
- Two non-trivial rotations commute if and only if
- They are on the same axis, or
- Axes are perpendicular and both rotations are 180\degree.
- Two rotations commute if and only if they preserve each others axis, that is, sends the others axis to itself.
Matrix Groups
Def. General Special Linear Groups
Let \mathbb{F} be a field and recall that the set of all invertible n \times n matrices form a group with matrix multiplication with the identity I_n.
Moreover, each matrix A in this group determines an invertible linear transformation:
\def\arraystretch{1.5} \begin{array}{rcl} f_A &:& \mathbb{F}^n \to \mathbb{F}^n \\ f_A(x) &=& Ax \end{array}The group of invertible n\times n is matrices called the general linear group denoted with \text{GL}_n(\mathbb{F}). Simply \text{GL}_n or \text{GL}(n) if the field is known. Unless otherwise stated, we will assume the field is the real numbers \R.
The subgroup of \text{GL}_n(\mathbb{F}) which is composed of n \times n matrices with the determinant equal to +1 is called the special linear group and denoted with \text{SL}_n(\mathbb{F}).
Note that we are using column vector notation, in the row-vector notation f_A would be defined as xA^T.
Def. Orthogonal Matrix
See the appendix for the formal definition of orthonormality.
An orthogonal (or orthonormal) matrix is a real square matrix whose columns and rows are orthonormal vectors. Equivalently, a matrix Q is orthogonal if
Q^T Q = IAn orthogonal matrix is called special if its determinant is 1. Moreover, note that the determinant of an orthogonal matrix is either +1 or -1 (exercise).
Def. Orthogonal Group
Noting the orthogonal n \times n matrices forms a group under matrix multiplication, we also define orthogonal group \text{O}_n and special orthogonal group \text{SO}_n where the latter is the subgroup of the former with elements of determinant value of +1.
We have seen so far that if A \in O_n, then f_A preserves the distance and the inner product (and thus preserves orthogonality).
Thm. \text{O}_2 and \text{SO}_2 on the Unit Circle
Let A \in \text{O}_2, then the columns of A are unit vectors and are orthogonal to one another. Noting these vectors lie in the unit circle we get the following two representations for A:
Let A has determinant +1, then we obtain
A = \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix}which is an element of \text{SO}_2 and represents anti-clockwise rotation. Notice how this implies each element of \text{SO}_2 has the form e^{i \theta}. Indeed, there is an isomorphism between the unit circle in the complex plane and \text{SO}_2.
Now, if A has determinant -1, then we obtain
A = \begin{bmatrix} \cos\theta & \sin\theta \\ \sin\theta & -\cos\theta \end{bmatrix}which represents reflection in a line at angle \frac{\theta}{2} to the positive x-axis.
Therefore, each 2 \times 2 orthogonal matrix represents either a rotation of the plane about the origin (determinant +1), or a reflection in a straight line through the origin (determinant -1).
Similarly, in the three-dimensional case, \text{SO}_3 represents a rotation of \R^3 about an axis which passes through the origin. Conversely, every rotation of \R^3 which fixes the origin is represented by a matrix in \text{SO}_3. From now on, we shall refer \text{SO}_3 as the rotation group in three dimensions.
Thm. Finite Subgroups of \text{O}_2
A finite subgroup of \text{O}_2 is either cyclic or dihedral.
Thm. Finite Subgroups of \text{SO}_3
A finite subgroup of \text{SO}_3 is isomorphic to either
- cyclic group,
- dihedral group,
- rotational symmetry group of one of the regular (platonic) solids
Thm. Rotations
In the plane every rotation commute. In \R^3, rotations usually does not commute and the only matrix commuting with all of \text{SO}_3 is the identity matrix. In \R^4, both \Set{I, -I} commutes with every other element in \text{SO}_4.
Recall the fact \det(\lambda A) = \lambda^n \det(A) where \lambda is a constant.
Exercises
#1
Show that the square of an orientation-reversing plane isometry is a translation.
#2
For any H \leq \text{O}_n, show that [H : H \cap \text{SO}_n] \leq 2.
Hint
Use the First Isomorphism Theorem with the homomorphism \text{O}_n \to \Set{\pm 1}.
#3
Show that \text{Isom}^+(\R^2) \trianglelefteq \text{Isom}(\R^2).
Group Actions
You may want to check group actions section of my group theory notes. You shoud at least be familiar with the definitions and how orbits partition the space.
Def. (Group) Action
Recall that, formally, an action of a group G on a set X is a homomorphism from G to the automorphism group of X, namely \text{Aut}(X). We may also say G acts on X.
From now on assume we are given an action of a group on a set X.
Thm. Same Orbit Conjugates
Points in the same orbit have conjugate stabilizers, so that for all x and y in the same orbit, say gx = y, then
g G_x g^{-1} = G_yThm. Orbit-Stabilizer Theorem
Let G be a group and x \in G, then
|G| = |\text{Orbit}(x)| \cdot |\text{Stab}(x)|In order to denote the orbit of x, the notations
- \bar{x},
- G(x)
- Gx
are also used. Similarly, for the stabilizer of x, the notations
- G_x
could be used as well.
Notice the direct divisibility results on finite groups this theorem implies.
Thm. Burnside's Lemma
The Burnside's Lemma which also known as The Counting Theorem asserts
|X/G| = \dfrac{1}{|G|} \sum_{g \in G} |X^g|where
- |X/G| denotes the number of orbits, and
- |X^g| denotes the number of elements in X fixed by g. This is also sometimes denoted with |\text{Fix}(g)|.
Notice X^g is not the stabilizer of x which are the elements in G fixed by g, but rather elements fixed in X by g.
Thm. Center of \bold{D}_{2n}
Z(\bold{D}_{2n}) = \begin{cases} \> \Set{e} &\text{if \enspace n is odd} \\ \> \Set{e, r^{n/2}} &\text{if \enspace n is even} \end{cases}Plane Isometries
In this section, by \R^2, we mean the two-dimensional plane in \R^2 with the usual Euclidian distance.
Thm. \text{Isom}(\R^n)
Let \text{Isom}(\R^n) denote the set of all isometries \R^n \to \R^n, then it forms a group under composition.
Sketch of Proof
We have already proved closure. Associativity, identity and inverse are trivial.
Thm. Plane Isometry Properties
An isometry u of \R^2
- maps any triangle ABC to a congruent triangle
- preserves angles, and
- maps lines to lines
Exercise
Thm. \text{Isom}(\R^2) Determinacy
An isometry of \R^2 is determined by its effect on any three non-collinear points.
Def. Translations
A translation t in \R^2 is a map that moves every point of the plane through a fixed distance in a fixed direction so that
(x_1, x_2) \mapsto (x_1 + a_1, x_2 + a_2)where \bold{a} = (a_1, a_2) is a constant.
Three key properties of translations are
- they are orientation preserving,
- have no fixed points unless \bold{a} = \bold{0}, and
- compose according to t(\bold{a})t(\bold{b}) = t(\bold{a+b}).
Def. Rotation
A rotation s is a map that moves every point of the plane through a fixed angle \theta about a fixed point O called the centre.
Three key properties of rotations are
- they are orientation preserving,
- have just one fixed point, and
- and compose according to s(O, \alpha)s(O, \beta) = s(O, \alpha + \beta).
We will denote a rotation through \theta about the point O with \rho_{O,\theta} and will omit O if it is the origin.
Def. Reflection
A reflection r is a map that moves every point of the plane to its mirror-image in a fixed line \ell called the axis..
Three key properties of reflections are
- they are orientation reversing,
- fix every point on the line \ell, and
- satisfy r(\ell)^2 = \bold{1}.
We will denote a reflection through a line \ell with \sigma_\ell.
Thm. Normal Form Theorem
Fix a point O and line \ell in \R^2 with O \in \ell, then any isometry u of \R^2 can be written uniquely in the form
u = r^\epsilon s twhere
- r is a reflection in \ell
- \epsilon = \pm 1
- s is a rotation around the point O, and
- t is a translation.
Def. Glide Reflection
Given a pair P, P' of distinct points on a line \ell in \R^2, the isometry
q(P, P') := r(\ell) t(\overrightarrow{PP'})is called a glide reflection. Such isometries have no fixed points and orientation reversing.
Thm. Product of Two Reflections
Given reflections r and r' in distinct lines \ell and \ell' in \R^2, their product rr' is a rotation or a translation whether \ell and \ell' meet or not. In the former case, the point of intersection is center of rotation. In the latter case, the translation is given by twice of the vector from \ell to \ell'.
Thm. Product of Three Reflections
The product of three reflections in \R^2 is either a reflection or a glide reflection.
Thm. Classification of Plane Isometries
In \R^2, an isometry is either
- identity (d),
- reflection (db)
- rotation (dp)
- translation (dd), or
- glide reflection (dq).
Thm. Characterisation of Plane Isometries
For the 4 isometry types we defined so far, we have the following characterization table
| Fixed Point? | Yes | No |
|---|---|---|
| OP | Rotation | Translation |
| OR | Reflection | Glide Reflection |
Thm. Isometries in the Complex Plane
Every isometry of the Euclidian plane \R^2 viewed as the complex line \Complex is of one of the forms
- f(z) = \alpha z + \beta, or
- f(z) = \alpha \bar{z} + \beta
where \alpha, \beta \in \Complex and |\alpha| = 1.
Moreover, one is orientation-preserving and the other one is orientation-reversing.
Thm. General Plane Isometry
Let u be any plane isometry, then there exists an 2 \times 2 orthogonal matrix \bold{M} and a vector v \in \R^2 such that
u(\bold{x}) = \bold{v} + \bold{M} \bold{x}for all x \in \R^2 where \bold{v} = u(\bold{0}) and \bold{M} is uniquely determined. Converse also holds i.e. this defines an isometry.
Therefore, the pair (\bold{v}, \bold{M}) where \bold{v} \in \R^2 and \bold{M} is an orthogonal 2 \times 2 matrix determines an isometry and vice-versa.
In row-vector notation, we would have u(\bold{x}) = \bold{v} + \bold{x}\bold{M}^T where \bold{x} and \bold{v} are row-vectors.
Thm. Explicit Classification of Plane Isometries
Before we continue, let u be an plane isometry, and define
\bold{A}_\theta = \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix}, \quad \bold{B}_\theta = \begin{bmatrix} \cos\theta & \sin\theta \\ \sin\theta & -\cos\theta \end{bmatrix}then, if u is a
- translation, then is of the form (\bold{v} , \bold{I}) for some translation vector \bold{v},
- rotation anti-clockwise through \theta about the origin, then is of the form (\bold{0}, \bold{A}_\theta),
- reflection in the line \ell passing through the origin, then is of the form (\bold{0}, \bold{B}_{2\theta}) where \theta is the clockwise angle between the line and the x-axis.
- rotation anti-clockwise through \theta about the point \bold{c}, then is of the form (\bold{c} - \bold{A}_\theta \bold{c}, \bold{A}_\theta)
- reflection in any line m, then is of the form (2\bold{a}, \bold{B}_{2\theta}) where \bold{a} is the vector from the origin to the line — where \theta defined as above,
- glide reflection with the line m for points \bold{a} and \bold{b}, then is of the form (2 \bold{a} + \bold{b}, \bold{B}_{2\theta}) — where \theta and \bold{a} defined as above.
Thm. 3-product of Reflections
Every plane isometry is a composition of at most 3 reflections.
Note how every reflection changes orientation.
Moreover, the composition of three reflections in the plane is always an orientation-preserving isometry, hence it is either
- a reflection, or
- glide reflection.
Thm. Two Parallel Lines
Let \ell \parallel m, then \sigma_\ell \sigma_m is a translation through twice the directed distance from l to m. Converse also holds.
Thm. Two Instersecting Lines
Let two lines \ell and m meet at C with the non-zero oriented angle from \ell to m being \theta / 2, then
\sigma_m \sigma_\ell = \rho_{C, \theta}Converse also holds so that every rotation is a product of two reflections in intersecting lines.
So if \theta is the smaller angle between two lines, then the composition of these reflections is a rotation by 2 \theta with center at the point of intersection.
Exercises
#1
Show that if \sigma_m \sigma_n where m \neq n fixes a point P, then P is on both m and n.
Euclidian Group
Thm. General Euclidian Isometry
Let f: \R^n \to \R^n be any Euclidian isometry, then there exists an orthogonal matrix \bold{A} \in \R^{n \times n} and a vector b \in \R^n such that
f(x) = \bold{A}x + bfor all x \in \R^n where b = f(0) and \bold{A} is uniquely determined.
Thm. \text{Isom}(\R)
Let f \in \text{Isom}(\R), then f is of the form
f(x) = \epsilon x + bwith \epsilon = \pm 1 and b \in \R. Moreover, if
- \epsilon = 1, then it is a translation, and
- \epsilon = -1, then it is a reflection
Direct result of the theorem General Euclidian Isometry proven above.
Thm. Euclidian Isometries Preserve the Midpoint
Let f: \R^n \to \R^n be an Euclidian isometry, then it preserves the midpoints so that
f\left(\dfrac{x+y}{2}\right) = \dfrac{f(x) + f(y)}{2}Exercise.
Note that this is not necessarily the case for other isometries nor other other norms on \R^n.
Def. Euclidian Group
The Euclidian Group is a subgroup of the group of affine transformations. Precisely, it is the subgroup that preserve the Euclidian distance between any two points.
The isometries of the Euclidian n-space \R^n form a group under function composition called the Euclidian group denoted by \mathbb{E}^n. Equivalently, it could be defined as the semidirect product of translational group \bold{T}(n) and the orthogonal group \bold{O}(n) so that
\mathbb{R}^n = \bold{T}(n) \rtimes \bold{O}(n)In the Euclidian group, isometries are often split into two classed based on how they affect the orientation, namely direct isometries and opposite isometries.
Direct isometries forms a subgroup in \mathbb{E}(n) denoted with \mathbb{E}^+(n) and their linear part has determinant +1.
Opposite isometries are not a subgroup on their own, but form the other half of \mathbb{E}^n denoted \mathbb{E}^-(n).
Thm. \mathbb{E}^2
In \mathbb{E}^2, every direct isometry is a translation or a rotation, and every opposite isometry is a reflection or a glide reflection.
A reflection in a line followed by a translation parallel to the same line is called a glide reflection.
Frieze Groups
Let G be a subgroup of the the Euclidian plane \mathbb{E}^2. Recall that every isometry of \mathbb{E}^2 can be written as \bold{A}x + b.
Now define a (surjective) projection homomorphism \pi as
\begin{array}{lll} \pi&:& G &\to& \bold{O}_2 \\ &&(\bold{A},b) &\mapsto& \bold{A} \end{array}then \pi(G) is called the point group of G.
The reason \pi(G) is called the point group of G is that it consists of isometries that have a fixed point in common. Notice that \pi(G) \leq \bold{O}_2.
It's kernel \text{Ker}(\pi) (which consists of translations) is called the translation subgroup of G denoted \mathbb{T}_G.
Notice G / \text{Ker}(\pi) \cong \pi(G), by the First Isomorphism Theorem.
Thm. Trivial Identity Only
Let G \leq \mathbb{E}^2 and \mathbb{T}_G = \{1\}, then there is a point O in \mathbb{E}^2 fixed by every element of G.
Corollary. Leonardo da Vinci
Every finite subgroup of \mathbb{E}^2 is either cyclic or dihedral.
Thm. Trichotomy
Let G be a discrete subgroup of \mathbb{E}^2, then its translation subgroup \mathbb{T}_G is either trivial, infinite cyclic, or free abelian of rank 2 i.e. generated by two independent translations.
We will inspect the case when \mathbb{T}_G is free abelian of rank 2 later on, for now lets look at infinite cyclic case.
Def. Frieze Group
Let F be a discrete subgroup of the Euclidian plane \mathbb{E}^2 whose translation subgroup is infinite cyclic i.e. \mathbb{T}_G = \Braket{t}, then F is called a frieze group.
Def. Seven Frieze Groups
There are exactly seven geometrically different types of frieze, and thus correspondingly seven different frieze groups denoted as
- F_1 = \Braket{t},
- F_1^1 = \Braket{t,r \mid r^2 = 1,\>t^r = t},
- F_1^2 = \Braket{t,r \mid r^2 = 1,\>t^r = t^{-1}},
- F_1^3 = \Braket{t,r \mid r^2 = t,\>t^r = t},
- F_2 = \Braket{t,s \mid s^2 = 1,\>t^s = t^{-1}},
- F_2^1 = \Braket{t,s,r \mid s^2 = 1,\>t^s = t^{-1},\>r^2 = 1,\> t^r = t,\>(sr)^2 = 1},
- F_2^2 = \Braket{t,s,r \mid s^2 = 1,\>t^s = t^{-1},\>r^2 = t,\> t^r = t,\>(sr)^2 = 1}.
See the illustrations in p. 86 of Johnson.
Lattices and Wallpaper Groups
So far, by Frieze Groups, we have investigated the repeating symmetries in one dimension. Now, we will widen our scope to two dimensional case with the wallpaper groups.
Def. Wallpaper Group
Let W be a subgroup of \mathbb{E}^2 such that its translation subgroup is \mathbb{T}_W generated by two independent translations (i.e. free abelian of rank 2) and its point group is finite, then W is called a wallpaper group.
So, G \leq \mathbb{E}_2 is a wallpaper group if it's translation subgroup is generated by two independent translations and its point group is finite.
Such groups, especially in three dimenions, are also called plane crystallographic group as the lattice spanned by three independent vectors of such groups gives a configuration of points which models the internal atomic structure found in crystals.
Thm. Lattice of W
We say the set L is the lattice spanned by \vec{a}, \vec{b} \in \R^2 so that L consists of all linear combinations m\vec{a} + n\vec{b} where m,n \in \Z.
Thm. Classification of Lattices in W
For wallpaper groups, we can classify the lattices into 5 different types according to the shape of the basic parellogram determined by the vectors \vec{a} and \vec{b}.
Replace \vec{b} by -\vec{b} if necessary to ensure that
\| \vec{a} - \vec{b} \| \leq \| \vec{a} + \vec{b} \|so that, we have either
- Oblique \| \vec{a} \| < \| \vec{b} \| < \| \vec{a} - \vec{b} \| < \| \vec{a} + \vec{b} \|
- Rectangular \| \vec{a} \| < \| \vec{b} \| < \| \vec{a} - \vec{b} \| = \| \vec{a} + \vec{b} \|
- Centered Rectangular \| \vec{a} \| < \| \vec{b} \| = \| \vec{a} - \vec{b} \| < \| \vec{a} + \vec{b} \|
- Square \| \vec{a} \| = \| \vec{b} \| < \| \vec{a} - \vec{b} \| = \| \vec{a} + \vec{b} \|
- Hexagonal \| \vec{a} \| = \| \vec{b} \| = \| \vec{a} - \vec{b} \| < \| \vec{a} + \vec{b} \|
Notice that we also have the rhombus shape for \| \vec{a} \| = \| \vec{b} \| < \| \vec{a} - \vec{b} \| < \| \vec{a} + \vec{b} \| but this draws a centred rectangular for the vectors \vec{a} - \vec{b} and \vec{a} + \vec{b}.
Thm. Order of Rotations in W
The order of a rotation in a wallpaper group can only be 2, 3, 4, or 6.
Therefore, the point group of a wallpaper group is generated by a rotation through one of the angles 0, \frac{2\pi}{2}, \frac{2\pi}{3}, \frac{2\pi}{4}, \frac{2\pi}{6} and possibly a reflection.
Every rotation in a wallpaper group W has finite order because the point group is finite.
Thm. Isomorphism Between Wallpaper Groups
An isomorphism between wallpaper groups takes
- translations to translations,
- rotations to rotations,
- reflections to reflections, and
- glide reflections to glide reflections.
Moreover, if two wallpaper groups are isomorphic then their point groups are also isomorphic.
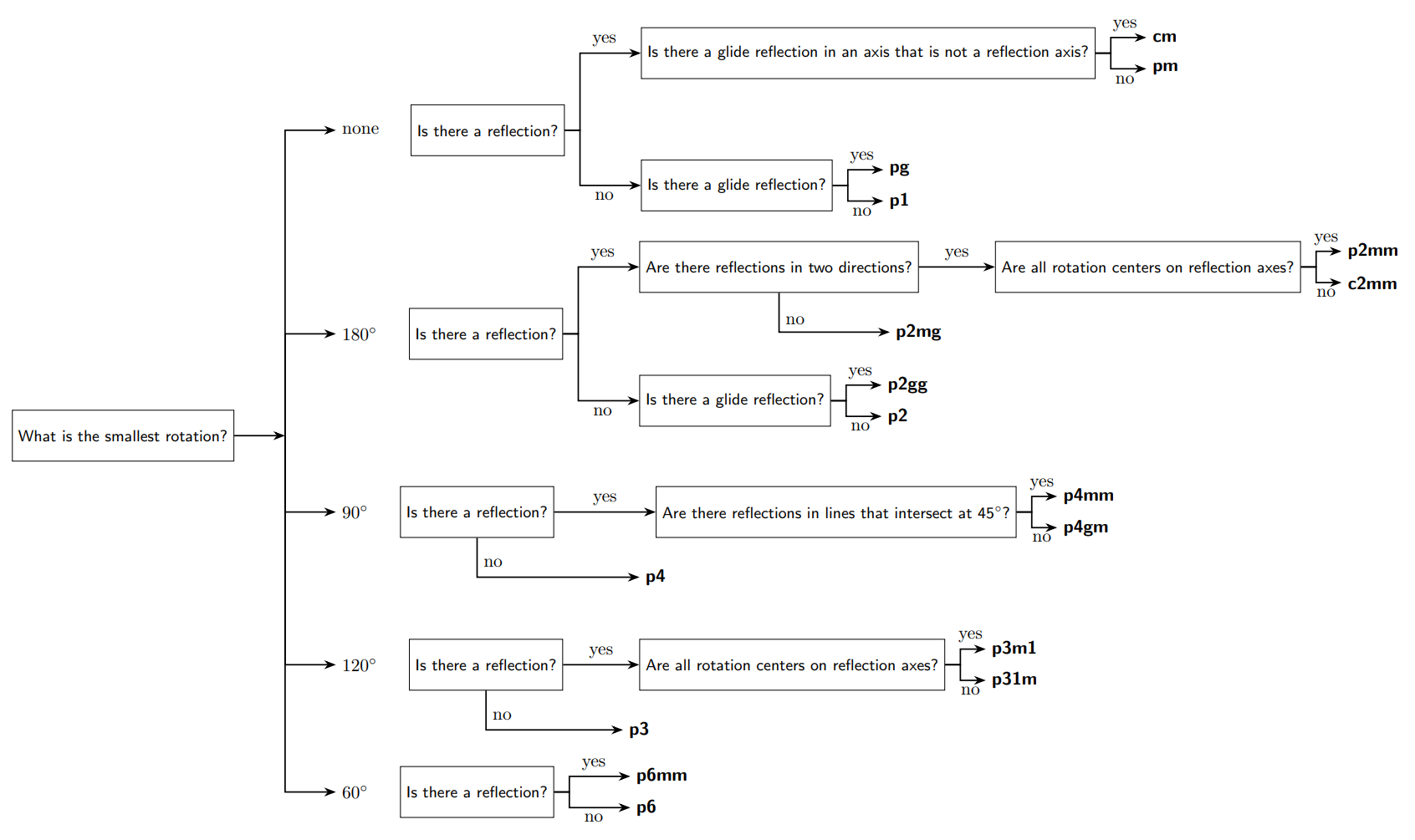
Wallpaper Patterns
17 Groups
There are 17 different wallpaper groups, we will just describe them. However, you should at least once read about it, see one of the resources used — for example Armstrong Chapter 26.
Finite Reflection Groups
From now on consider \Braket{x,y} := x \cdot y where x,y \in \R^n.
Def. Reflection
So far we should have a good idea about what a reflection is for plane. Now, we will now provide a more general definition for reflection for the Euclidian n-space.
Given a non-zero vector \alpha \in \R^n, we define the reflection s_\alpha as a linear operator on \R^n which sends \alpha to -\alpha while fixing hyperplane H_\alpha orthogonal to \alpha. This is enough to define s_\alpha for all values on \R^n. So,
\begin{array}{rcl} s_\alpha &:& \R^n \to \R^n \\ && \alpha \mapsto -\alpha \\ && v \mapsto v & \forall v \in \Braket{\alpha}^\bot \end{array}One could write down this linear transformation as
s_\alpha (x) = x - 2\dfrac{\Braket{x, \alpha}}{\Braket{\alpha, \alpha}} \qquad \forall x \in \R^nBear in mind that s_\alpha = s_{c\alpha} for any non-zero scalar c \in \R.
Thm. Basic Properties of s_\alpha
Let \alpha \in \R^n be any non-zero vector and c \in \R a non-zero scaler, then
- s_\alpha = s_{c\alpha} since \Braket{\alpha}^\bot = \Braket{c \alpha}^\bot,
- s_\alpha^2 = 1,
- s_\alpha \in \bold{O}_n that is s_\alpha is an orthogonal transformation.
Def. Finite Reflection Group
A finite reflection group is a finite group generated by reflections. Therefore, finite reflections groups are finite subgroups of \bold{O}_n.
A group generated by finitely many reflections need not to be finite group. For example, consider the single reflection with \theta = \sqrt{2} \pi whose order is infite.
Thm. \bold{D}_{2n}
Recalling that composition of two reflections is a rotation, we have the following group representation for \bold{D}_{2n}
\bold{D}_{2n} = \Braket{s_1, s_2 \mid s_1^2 = s^2 = 1, (s_1s_2)^n = 1}where s_1 s_2 represents the smallest rotation of regular n-gon.
Therefore, \bold{D}_{2n} is a finite reflection group.
Thm. \bold{S}_n
More generally, the symmetric group \bold{S}_n is also a finite reflection group where the transpoition (ij) corresponds to the reflection s_{e_i - e_j}.
Root Systems
Let W be a finite reflection group. Notice that for each reflection s_\alpha \in W, we have a corresponding hyperplane H_\alpha and a line \Braket{\alpha} spanned by \alpha.
Thm. W and \bold{O}_n
Given W which is finite reflection group, and therefore a finite subgroup of \bold{O}_n, let t \in \bold{O}_n and non-zero \vec{\alpha} \in \R^n, then
t s_\alpha t^{-1} = s_{t(\alpha)}In particular, if w \in W and s_\alpha \in W, then
w s_\alpha w^{-1} = s_{w(\alpha)}which is an element of W.
Therefore, W permutes the set of all lines \{\Braket{\alpha} \mid s_\alpha \in W\} via
w(\Braket{\alpha}) = \Braket{w(\alpha)}Def. Root Sytem
Now that we know W permutes the lines of W, if we select unit vectors lying in all such lines, then these vectors will be stable under the action of W.
Indeed, the equality of lengths of vectors are insignificant as we only care about the stability under W.
A finite set \Phi of non-zero vectors of \R^n is called a root system if for all \alpha \in \Phi
- \Phi \cap \Braket{a} = \{-\alpha, \alpha\} for all \alpha \in \Phi, and
- s_\alpha(\Phi) = \Phi.
The elements of \Phi are called the roots of \Phi.
Def. Simple System
The root system \Phi could get extremely large, therefore we may aim for a linearly independent subset.
A subset \Delta \subseteq \Phi is called a simple system if \Delta is a basis for \Braket{\Phi} and for each \alpha \in \Phi we have
\alpha = \sum_{i=1}^n c_i y_ifor some y_i \in \Delta where \{c_i\} are either all non-positive or all non-negative. Elements of \Delta are called the simple roots, and the corresponding reflections s_\alpha are called simple reflections.
Thm. Lemma for \Delta
Let \Delta be a simple system for \Phi, then
\Braket{\alpha, \beta} \leq 0for all \alpha, \beta \in \Delta if \alpha \neq \beta.
So, once a vector has been chosen, we only have to consider vectors pointing in the opposite direction as candidates to be added to the simple system.
Thm. Simple Systems and Finite Reflection Groups
Let \Delta be a simple system for \Phi and W be the associated reflection group, then
W = \Braket{s_{\alpha_1}, ..., s_{\alpha_k} \mid (s_{\alpha_i} s_{\alpha_j})^{m_{ij}} = 1 \quad \forall \alpha_i \in \Delta}where m_{ij} is the order of the product s_{\alpha_i} s_{\alpha_j}. Therefore, W is determined up to isomorphism by the set of integers m_{ij} where \alpha_i, \alpha_j \in \Delta.
Coxeter Groups
Def. Coxeter Group
Informally, a Coxeter group is an abstract group that admits formal description in terms of reflections. Indeed, every finite Coxeter group admits a faithful representation as a finite reflection group of some Euclidian space and vice-versa.
Formally, Coxeter group is defined with the presentation
W = \Braket{s_1, ..., s_n \mid s_i^2 = 1,\>(s_i s_j)^{m_{ij}} = 1}Def. Coxeter Graph
Finite Coxeter groups are classified in terms of their Coxeter diagrams. Let W be a Coxeter group with simple reflections \{s_1, ..., s_n\}. Then, the Coxeter graph is a labeled simple graph where
- For each generator s_i, there corresponds an unique vertex v_i,
- Two vertices v_i and v_j is connected by and edge e_{ij} if m_{ij} > 2,
- Moreover, if m_{ij} > 3, then we label e_{ij} with m_{ij}.
Notice that we do not label the edge if m_{ij} = 3 and do not connect v_i and v_j if m_{ij} < 3.
Moreover, if the Coxeter graph (of a reflection group) is connected, then we say it irreducible.
For example, the Coxeter graph of the dihedral group \bold{D}_{2n} is
\bullet \overset{n}{\text{-----}} \bulletand the Coxeter graph of \bold{S}_n is given by
\underset{1}{\bullet} \text{-----} \underset{2}{\bullet} \text{-----} \underset{3}{\bullet} \cdots \underset{n-2}{\bullet} \text{-----} \underset{n-1}{\bullet}since
\bold{S}_n = \Braket{t_i \mid 1 \leq i \leq n -1}where t_i := (i \> i+1), and (t_i\>t_j)^2 = 1 if |i-j| \geq 2.
Appendix 1. Linear Algebra
Def. Inner Product Space
An inner product space is a vector space \mathcal{V} over the field \mathbb{F} together with an inner product
\braket{\cdot, \cdot}: \mathcal{V} \times \mathcal{V} \to \mathbb{F}that satisfies, for all vectors x,y,z \in \mathcal{V} and scalars a,b \in \mathbb{F}
- \Braket{x,y} = \overline{\Braket{y, x}} called symmetry axiom
- \Braket{x + y, z} = \Braket{x,z} + \Braket{y,z} called additivity axiom
- \Braket{ax, y} = a\Braket{x,y} called homogenity axiom
- \Braket{x,x} \geq 0 and \Braket{x,x} = 0 \iff x = 0 called the positivity axiom
Thm. Cauchy-Schwarz Inequality
Let x,y be two vectors in the inner product space \mathcal{V}, then
\vert \Braket{x,y} \vert \leq \Vert x \Vert \cdot \Vert y \Vertwhere \Vert \cdot \Vert is the norm induced by the inner product.
Def. Kronecker Delta Function
\delta_{ij} := \begin{cases} \> 0 & \text{if } \enspace i \neq j \\ \> 1 & \text{if } \enspace i = j \end{cases}Def. Orthonormal
Let \mathcal{V} be an inner product space. A set of vectors \Set{v_1, v_2, ...} \subseteq \mathcal{V} is called orthonormal if
\forall i,j \Braket{u_i, u_j} = \delta_{ij}Each vector is orthogonal to each other.
Thm. Basic Properties of Orthonal Matrices
Let \bold{O} be an orthogonal matrix, then
- \bold{O} is invertible.
- \bold{O}^T \bold{O} = \bold{I}
- The determinant of \bold{O} is either 1 or -1.
- If \bold{O} is special orthogonal matrix, then — as a linear transformation — it acts as a rotation around a fixed point if n \geq 2 in \R^n.
Appendix 2. Group Theory
You might want to check out my group theory notes as well.
Def. Semidirect Product
Let G be a group with the identity e, H \leq G and N \trianglelefteq G such that N \cap H = \Set{e}. We say G is the semidirect product of N and H if G=NH denoted by G = N \rtimes H or G = H \ltimes N.
Notice how \rtimes points toward the normal group similar to \trianglelefteq.
This is not a good definition of the semidirect product but a simple one. Curious reader might want to check out other resources.
Thm.
Let G be a group with a (normal) subgroup N of index 2. If there exists g \in G \setminus N of order 2, then
G = N \rtimes \Braket{g}